
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Ένα άρθρο για να κατανοήσετε τη διαφορά μεταξύ βηματικών κινητήρων και σερβοκινητήρων και σερβοκινητήρων
I. Διαφορές μεταξύ βηματικών κινητήρων και σερβοκινητήρων και σερβοκινητήρων
Βηματικός κινητήρας: είναι το ηλεκτρικό παλμικό σήμα σε γωνιακή μετατόπιση ή μετατόπιση γραμμής των τμημάτων βηματικού κινητήρα του στοιχείου ελέγχου ανοιχτού βρόχου. Με απλά λόγια, βασίζεται στο ηλεκτρικό παλμικό σήμα για τον έλεγχο της γωνίας και του αριθμού των στροφών. Οπότε βασίζεται μόνο στο παλμικό σήμα για να καθορίσει πόση περιστροφή. Επειδή δεν υπάρχει αισθητήρας, η γωνία ακινητοποίησης μπορεί να αποκλίνει. Ωστόσο, το ακριβές σήμα παλμού ελαχιστοποιεί την απόκλιση.
Σερβοκινητήρας: βασιστείτε στο κύκλωμα ελέγχου σερβομηχανισμού για να ελέγξετε την ταχύτητα του κινητήρα, μέσω του αισθητήρα για να ελέγξετε τη θέση περιστροφής. Έτσι ο έλεγχος θέσης είναι πολύ ακριβής. Και η ταχύτητα περιστροφής είναι επίσης μεταβλητή.
Servo (Ηλεκτρονικός Servo): Το κύριο εξάρτημα του σερβομηχανισμού είναι ο σερβοκινητήρας. Περιέχει κύκλωμα ελέγχου σερβοκινητήρα + σετ μειωτήρα. Ω ναι, ο σερβοκινητήρας δεν έχει σετ μειωτήρα. Και ο σερβομηχανισμός έχει σετ μειωτήρα ταχυτήτων.
Στην περίπτωση ενός οριακού σερβομηχανισμού, βασίζεται σε ένα ποτενσιόμετρο κάτω από τον άξονα εξόδου για τον προσδιορισμό της γωνίας διεύθυνσης του βραχίονα του πηδαλίου. Ο έλεγχος σήματος σερβομηχανισμού είναι ένα σήμα διαμορφωμένου πλάτους παλμού (PWM), όπου ένας μικροελεγκτής μπορεί εύκολα να παράγει αυτό το σήμα.
II. Βασική αρχή βηματικού κινητήρα
Πώς λειτουργεί:
Κανονικά ο ρότορας ενός κινητήρα είναι ένας μόνιμος μαγνήτης και όταν το ρεύμα ρέει μέσω των περιελίξεων του στάτη, οι περιελίξεις του στάτη παράγουν ένα διανυσματικό μαγνητικό πεδίο. Αυτό το μαγνητικό πεδίο θα οδηγήσει τον ρότορα να περιστρέφεται κατά γωνία, έτσι ώστε η κατεύθυνση του ζεύγους μαγνητικών πεδίων του ρότορα να είναι ίδια με την κατεύθυνση του μαγνητικού πεδίου του στάτορα. Όταν το διανυσματικό μαγνητικό πεδίο του στάτορα περιστρέφεται κατά γωνία. Ο ρότορας περιστρέφεται επίσης κατά γωνία με αυτό το μαγνητικό πεδίο. Για κάθε ηλεκτρικό παλμό εισόδου, ο κινητήρας περιστρέφεται ένα γωνιακό βήμα προς τα εμπρός. Η γωνιακή μετατόπισή του είναι ανάλογη με τον αριθμό των παλμών εισόδου και η ταχύτητα περιστροφής του είναι ανάλογη με τη συχνότητα των παλμών. Αλλάζοντας τη σειρά με την οποία ενεργοποιούνται οι περιελίξεις, ο κινητήρας αντιστρέφεται. Επομένως, ο αριθμός και η συχνότητα των παλμών και η σειρά ενεργοποίησης των περιελίξεων κάθε φάσης του κινητήρα μπορούν να ελεγχθούν για τον έλεγχο της περιστροφής του βηματικού κινητήρα.
Αρχή παραγωγής θερμότητας:
Συνήθως δείτε όλα τα είδη κινητήρων, εσωτερικά είναι ο πυρήνας σιδήρου και το πηνίο περιέλιξης. Η αντίσταση περιέλιξης, η ισχύς θα παράγει απώλεια, το μέγεθος απώλειας και την αντίσταση και το ρεύμα είναι ανάλογο με το τετράγωνο, το οποίο συχνά αναφέρεται ως απώλεια χαλκού, εάν το ρεύμα δεν είναι το τυπικό DC ή ημιτονοειδή κύμα, θα παράγει επίσης αρμονική απώλεια. Ο πυρήνας έχει υστέρηση δινορευματικού ρεύματος, στο εναλλασσόμενο μαγνητικό πεδίο θα παράγει επίσης απώλεια, το μέγεθος του υλικού, το ρεύμα, η συχνότητα, η τάση που σχετίζονται, η οποία ονομάζεται απώλεια σιδήρου. Η απώλεια χαλκού και η απώλεια σιδήρου θα εκδηλωθούν με τη μορφή παραγωγής θερμότητας, επηρεάζοντας έτσι την απόδοση του κινητήρα. Ο βηματικός κινητήρας επιδιώκει γενικά την ακρίβεια τοποθέτησης και την απόδοση ροπής, η απόδοση είναι σχετικά χαμηλή, το ρεύμα είναι γενικά μεγαλύτερο και οι αρμονικές συνιστώσες είναι υψηλές, η συχνότητα του ρεύματος εναλλάσσεται με την ταχύτητα και την αλλαγή.
III. Κατασκευή πηδαλίου
Ο σερβομηχανισμός αποτελείται κυρίως από ένα περίβλημα, μια πλακέτα κυκλώματος, έναν κινητήρα μετάδοσης κίνησης, έναν μειωτήρα ταχυτήτων και ένα στοιχείο ανίχνευσης θέσης. Η αρχή λειτουργίας του είναι ότι ο δέκτης στέλνει ένα σήμα στον σερβομηχανισμό και το IC στην πλακέτα κυκλώματος οδηγεί τον κινητήρα χωρίς πυρήνα να αρχίσει να περιστρέφεται, και η ισχύς μεταδίδεται στον αιωρούμενο βραχίονα μέσω του μειωτήρα και ταυτόχρονα ο ανιχνευτής θέσης στέλνει ένα σήμα πίσω για να προσδιορίσει αν έχει φτάσει στην τοποθέτηση ή όχι. Ο ανιχνευτής θέσης είναι στην πραγματικότητα μια μεταβλητή αντίσταση. Όταν ο σερβομηχανισμός περιστρέφεται, η τιμή της αντίστασης θα αλλάξει ανάλογα και η γωνία περιστροφής μπορεί να γίνει γνωστή ανιχνεύοντας την τιμή της αντίστασης. Ο γενικός σερβοκινητήρας είναι ένα λεπτό χάλκινο σύρμα τυλιγμένο γύρω από έναν τριπολικό ρότορα, όταν το ρεύμα ρέει μέσω του πηνίου θα δημιουργήσει ένα μαγνητικό πεδίο και η περιφέρεια του μαγνήτη του ρότορα θα παράγει απώθηση, η οποία με τη σειρά της δημιουργεί τη δύναμη περιστροφής. Σύμφωνα με τη φυσική, η ροπή αδράνειας ενός αντικειμένου είναι ευθέως ανάλογη με τη μάζα του, επομένως όσο μεγαλύτερη είναι η μάζα του προς περιστροφή αντικειμένου, τόσο μεγαλύτερη είναι η δύναμη που απαιτείται. Προκειμένου να επιτευχθεί γρήγορη ταχύτητα περιστροφής και χαμηλή κατανάλωση ενέργειας, ο σερβομηχανισμός είναι κατασκευασμένος από λεπτά χάλκινα σύρματα στριμμένα σε έναν πολύ λεπτό κοίλο κύλινδρο, σχηματίζοντας έναν πολύ ελαφρύ κοίλο ρότορα χωρίς πόλους και μαγνήτες τοποθετούνται μέσα στον κύλινδρο, που είναι ο κινητήρας κοίλου κυπέλλου.
Προκειμένου να ταιριάζουν σε διαφορετικά περιβάλλοντα εργασίας, υπάρχουν σερβομηχανισμοί με αδιάβροχα και αδιάβροχα σχέδια. και ανάλογα με τις διαφορετικές απαιτήσεις φορτίου, υπάρχουν πλαστικά και μεταλλικά γρανάζια για σερβομηχανισμούς, και τα μεταλλικά γρανάζια για σερβομηχανισμούς είναι γενικά υψηλής ροπής και υψηλής ταχύτητας, με το πλεονέκτημα ότι τα γρανάζια δεν θα θρυμματιστούν λόγω υπερβολικών φορτίων. Οι σερβομηχανισμοί ανώτερης ποιότητας θα είναι εξοπλισμένοι με ρουλεμάν για να κάνουν την περιστροφή ταχύτερη και ακριβέστερη. Υπάρχει διαφορά μεταξύ ενός ρουλεμάν και δύο ρουλεμάν, φυσικά τα δύο ρουλεμάν είναι καλύτερα. Οι νέοι σερβομηχανισμοί FET χρησιμοποιούν κυρίως FET (Field Effect Transistor), το οποίο έχει το πλεονέκτημα της χαμηλής εσωτερικής αντίστασης και επομένως μικρότερης απώλειας ρεύματος από τα κανονικά τρανζίστορ.
IV. Αρχή λειτουργίας σερβομηχανισμού
Από το κύμα pwm στο εσωτερικό κύκλωμα για να δημιουργήσει μια τάση πόλωσης, η γεννήτρια επαφέα μέσω του μειωτήρα για να οδηγήσει το ποτενσιόμετρο να κινηθεί, έτσι ώστε όταν η διαφορά τάσης είναι μηδέν, ο κινητήρας σταματά, έτσι ώστε να επιτευχθεί το αποτέλεσμα του σερβομηχανισμού.
Τα πρωτόκολλα για τα servo PWM είναι όλα τα ίδια, αλλά οι πιο πρόσφατοι σερβομηχανισμοί που εμφανίζονται μπορεί να είναι διαφορετικοί.
Το πρωτόκολλο είναι γενικά: πλάτος υψηλού επιπέδου σε 0,5 ms ~ 2,5 ms για έλεγχο του σερβομηχανισμού ώστε να περιστρέφεται από διαφορετικές γωνίες.
V. Πώς λειτουργούν οι σερβοκινητήρες
Το παρακάτω σχήμα δείχνει ένα κύκλωμα ελέγχου σερβοκινητήρα κατασκευασμένο με έναν λειτουργικό ενισχυτή ισχύος LM675 και ο κινητήρας είναι σερβοκινητήρας συνεχούς ρεύματος. Όπως φαίνεται από το σχήμα, ο λειτουργικός ενισχυτής ισχύος LM675 τροφοδοτείται από 15 V και η τάση 15 V προστίθεται στην είσοδο φάσης του λειτουργικού ενισχυτή LM675 μέσω RP 1 και η τάση εξόδου του LM675 προστίθεται στην είσοδο του σερβοκινητήρα. Ο κινητήρας είναι εξοπλισμένος με γεννήτρια σήματος μέτρησης ταχύτητας για ανίχνευση της ταχύτητας του κινητήρα σε πραγματικό χρόνο. Στην πραγματικότητα, η γεννήτρια σήματος ταχύτητας είναι ένα είδος γεννήτριας και η τάση εξόδου της είναι ανάλογη με την ταχύτητα περιστροφής. Η έξοδος τάσης από τη γεννήτρια σήματος μέτρησης ταχύτητας G ανατροφοδοτείται στην είσοδο αναστροφής του λειτουργικού ενισχυτή ως σήμα σφάλματος ταχύτητας μετά από ένα κύκλωμα διαιρέτη τάσης. Η τιμή τάσης που ορίζεται από το ποτενσιόμετρο εντολής ταχύτητας RP1 προστίθεται στην είσοδο φάσης του λειτουργικού ενισχυτή μετά τη διαίρεση της τάσης με R1.R2, η οποία είναι ισοδύναμη με την τάση αναφοράς.
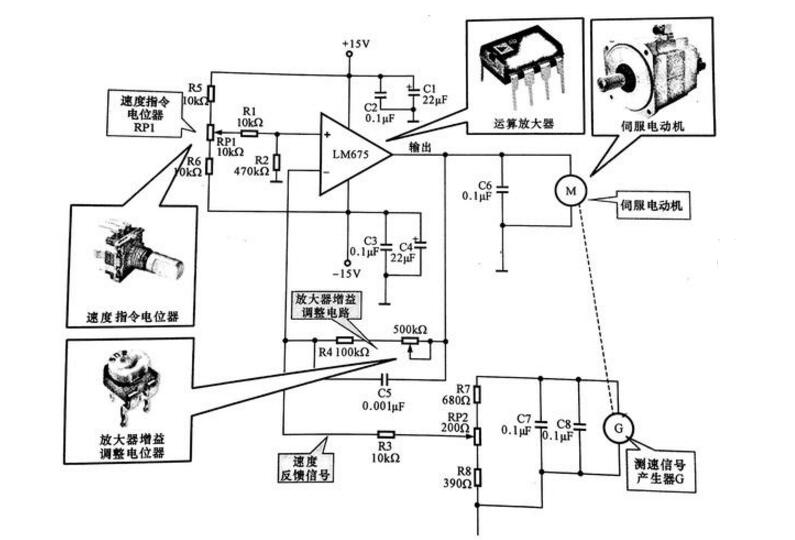
Σχήμα ελέγχου σερβοκινητήρα
Σερβοκινητήρας: Υποδεικνύεται με το γράμμα M για τον σερβοκινητήρα, είναι η πηγή ισχύος για το σύστημα μετάδοσης κίνησης. Λειτουργικός ενισχυτής: υποδηλώνεται με το όνομα κυκλώματος, δηλαδή, LM675, είναι ένα κομμάτι ενισχυτή στο κύκλωμα ελέγχου σερβομηχανισμού που παρέχει το ρεύμα κίνησης για τον σερβοκινητήρα.
Ποτενσιόμετρο εντολής ταχύτητας RP1: Ρυθμίζει την τάση αναφοράς του λειτουργικού ενισχυτή στο κύκλωμα, δηλαδή τη ρύθμιση της ταχύτητας. Ποτενσιόμετρο ρύθμισης κέρδους ενισχυτή RP2: Χρησιμοποιείται στο κύκλωμα για να ρυθμίσει με ακρίβεια το κέρδος του ενισχυτή και το μέγεθος του σήματος ανάδρασης ταχύτητας, αντίστοιχα.
Όταν το φορτίο του κινητήρα αλλάζει, η τάση που τροφοδοτείται πίσω στην ανεστραμμένη είσοδο του λειτουργικού ενισχυτή αλλάζει επίσης, δηλαδή όταν αυξάνεται το φορτίο του κινητήρα, η ταχύτητα μειώνεται και η τάση εξόδου της γεννήτριας σήματος ταχύτητας επίσης μειώνεται, έτσι ώστε η τάση στην ανεστραμμένη είσοδο αυτής της τάσης αναφοράς και του ενισχυτή να μειώνεται. αυξάνεται και η τάση εξόδου του λειτουργικού ενισχυτή αυξάνεται. Αντίθετα, όταν το φορτίο γίνεται μικρότερο και η ταχύτητα του κινητήρα αυξάνεται, η τάση εξόδου της γεννήτριας σήματος μέτρησης ταχύτητας αυξάνεται, η τάση ανάδρασης που προστίθεται στην ανεστραμμένη είσοδο του λειτουργικού ενισχυτή αυξάνεται, η διαφορά μεταξύ αυτής της τάσης και της τάσης αναφοράς μειώνεται, η τάση εξόδου του κινητήρα μειώνεται ανάλογα και μειώνεται η ταχύτητα λειτουργίας. Η ταχύτητα περιστροφής μπορεί να σταθεροποιηθεί αυτόματα στην καθορισμένη τιμή.
Προηγούμενος:Lichuan ΝΕΟ προϊόν---Σερβοκινητήρας AC Ethercat
Αποστολή Ερώτησης


X
Χρησιμοποιούμε cookies για να σας προσφέρουμε καλύτερη εμπειρία περιήγησης, να αναλύσουμε την επισκεψιμότητα του ιστότοπου και να εξατομικεύσουμε το περιεχόμενο. Χρησιμοποιώντας αυτόν τον ιστότοπο, συμφωνείτε με τη χρήση των cookies από εμάς.
Πολιτική Απορρήτου